29-08-2025-Mechanical Measurements - Dynamic Calibration of a Second-Order Instrument [EN]-[IT]
~~~ La versione in italiano inizia subito dopo la versione in inglese ~~~
ENGLISH

29-08-2025-Mechanical Measurements - Dynamic Calibration of a Second-Order Instrument [EN]-[IT]
With this post, I would like to provide a brief introduction to the topic in question.
(lesson/article code: LE_C-80)
Dynamic Calibration of a Second-Order Instrument

Image created with artificial intelligence, the software used is Microsoft Copilot
Introduction
In the field of mechanical and thermal measurements, a second-order sensor is a sensor whose dynamic behavior is described mathematically by a second-order differential equation.
Difference between a first-order and second-order sensor
First-order sensor
A first-order sensor is a sensor whose dynamic behavior can be described by a first-order differential equation. Its response to an input change is not immediate, but follows an exponential trend characterized by a single time constant τ.
Below is the first-order model equation:
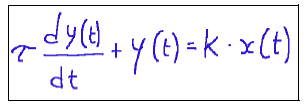
Where:
y(t) = sensor output signal
x(t) = input signal
K = static sensitivity of the sensor
τ = time constant (s), which indicates the response speed.
Second-order sensor
A second-order sensor is a sensor whose dynamic behavior can be described by a second-order differential equation.
Essentially, when a sensor does not have an instantaneous response, but exhibits phenomena such as inertia, oscillations, or damping, it is no longer considered first-order, but second-order.
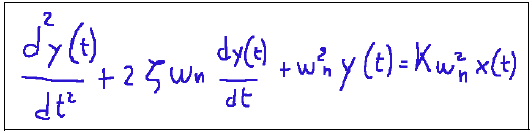
Below is a typical equation for a second-order system:

Where:
y(t) = sensor output signal
x(t) = input quantity
ωn = natural frequency (rad/s)
ζ = damping coefficient
y˙ (t) and y¨(t) = first and second derivatives over time
Dynamic Calibration Procedure for a Second-Order Instrument
The procedure for dynamic calibration of a second-order instrument using the impulse response in the underdamped case is described below, i.e. ζ<1 starting from the fact that a second-order instrument can be described by the differential equation described below:
Where:
y(t) = instrument output
x(t) = pulse input
ωn = natural frequency (rad/s)
ζ = damping coefficient
K = static gain
The calibration steps Dynamic
Image created with artificial intelligence, the software used is Napkin.ai
The steps for dynamic calibration of a second-order instrument are as follows:
1-Generation of the impulse input
2-Response recording
3-Response analysis
4-Calculation of dynamic parameters
Below, I will attempt to describe the four steps mentioned above.
1-Generation of the impulse input
The initial step consists of applying an ideal impulse to the instrument's input. Note: The impulse must be sufficiently short compared to the instrument's dynamic range.
2-Response Recording
At this point, we record the instrument's output y(t) over time.
3-Response Analysis
In this phase, we identify the response of oscillations with decreasing amplitude.
We can measure three parameters:
-The amplitude of the first peak A1
-The amplitude of the second peak A2
-The oscillation period Td
4-Calculating Dynamic Parameters
The final phase is calculating the dynamic parameters, namely, damping (ζ), natural pulsation (ωn), and static gain K.
Below are the mathematical formulas for the parameters described above.
Damping ζ
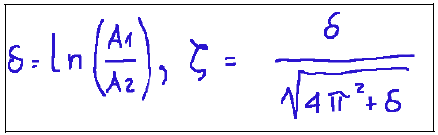
Natural Pulse ωn
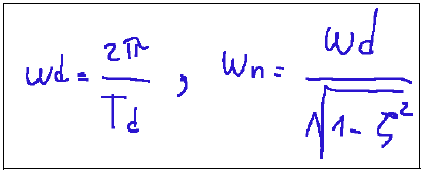
Static Gain
The static gain K can be estimated from the final response value or by comparing it with the input.
Conclusions
The goal of dynamic calibration is to determine characteristic parameters of an instrument by analyzing its time response to a known signal. Characteristic parameters can include: natural frequency, damping, and static gain.
Compared to the dynamic calibration of a first-order instrument, the dynamic calibration of a second-order instrument requires a more in-depth analysis of the time response, the calculation of parameters such as damping and natural pulsation, and finally an understanding of the oscillatory behavior.
Question
When dynamically calibrating a second-order instrument to verify the correct dynamic response, "step" tests are often used. Did you know that this means that, in practice, a simple sharp tap can reveal a lot about the dynamic behavior?
![]()
ITALIAN

29-08-2025-Misure meccaniche - Taratura dinamica di uno strumento del II ordine [EN]-[IT]**
Con questo post vorrei dare una breve istruzione a riguardo dell’argomento citato in oggetto
(codice lezione/articolo: LE_C-80)
Taratura dinamica di uno strumento del II ordine
immagine creata con l’intelligenza artificiale, il software usato è Microsoft Copilot
Introduzione
Nell’ambito delle misure meccaniche e termiche un sensore di secondo ordine è un sensore il cui comportamento dinamico viene descritto matematicamente da un’equazione differenziale del secondo ordine.
Differenza tra sensore di I ordine e II ordine
Sensore di I ordine
Un sensore di I ordine è un sensore il cui comportamento dinamico può essere descritto da un’equazione differenziale del primo ordine. La sua risposta ad una variazione in ingresso non è immediata, ma segue un andamento esponenziale caratterizzato da una sola costante di tempo τ.
Qui di seguito l’equazione del modello di primo ordine:
Dove:
y(t)=segnale d’uscita del sensore
x(t)=segnale di ingresso
K=sensibilità statica del sensore
τ= costante di tempo (s), la quale indica la rapidità di risposta.
Sensore di II ordine
Un sensore di II ordine è un sensore il cui comportamento dinamico può essere descritto da un’equazione differenziale del secondo ordine.
Sostanzialmente quando un sensore non ha una risposta istantanea, ma presenta fenomeni come inerzia, oscillazioni o smorzamento, non è più considerato di I ordine, ma di secondo ordine.
Qui di seguito l’equazione tipica di un sistema di II ordine:
Dove:
y(t)=segnale d’uscita del sensore
x(t)=grandezza di ingresso
ωn=frequenza naturale (rad/s)
ζ= coefficiente di smorzamento
y˙ (t) e y¨(t)=derivate prima e seconda nel tempo
Procedura di taratura dinamica di uno strumento del II ordine
Qui di seguito è descritta la procedura per la taratura dinamica di uno strumento del II ordine usando la risposta all’impulso nel caso sottosmorzato, cioè ζ<1 partendo dal fatto che uno strumento del II ordine può essere descritto dall’equazione differenziale descritta qui di seguito:
Dove:
y(t)=uscita dello strumento
x(t)=ingresso impulso
ωn=frequenza naturale (rad/s)
ζ= coefficiente di smorzamento
K=guadagno statico
Le fasi della taratura dinamica
immagine creata con l’intelligenza artificiale, il software usato è Napkin.ai
Le fasi della taratura dinamica di uno strumento di II ordine sono le seguenti:
1-Generazione dell’ingresso impulsivo
2-Registrazione della risposta
3-Analisi della risposta
4-Calcolo dei parametri dinamici
Qui di seguito provo a descrivere le quattro fasi citate sopra.
1-Generazione dell’ingresso impulsivo
La fase iniziale consiste nell’applicare un impulso ideale all’ingresso dello strumento. Nota: L'impulso deve essere sufficientemente breve rispetto alla dinamica dello strumento.
2-Registrazione della risposta
A questo punto si va a rilevare l’uscita y(t) dello strumento nel tempo
3-Analisi della risposta
In questa fase si va ad identificare la risposta delle oscillazioni con ampiezza decrescente.
Possiamo misurare 3 parametri:
-L’ampiezza del primo picco A1
-L’ampiezza del secondo picco A2
-Il periodo di oscillazione Td
4-Calcolo dei parametri dinamici
L’ultima fase è quella del calcolo dei parametri dinamici, cioè dello smorzamento (ζ), della pulsazione naturale (ωn) e del guadagno statico K
Qui di seguito le formule matematiche dei parametri descritti sopra.
Smorzamento ζ
Pulsazione naturale ωn
Guadagno statico
Il guadagno statico K si può stimare dal valore finale della risposta o da confronti con l’ingresso.
Conclusioni
L’obiettivo della taratura dinamica è quello di determinare parametri caratteristici di uno strumento analizzando la sua risposta nel tempo a un segnale noto. I parametri caratteristici possono essere: frequenza naturale, smorzamento e guadagno statico.
Rispetto alla taratura dinamica di uno strumento di I ordine, la taratura dinamica di uno strumento di II ordine richiede un’analisi più approfondita della risposta del tempo, il calcolo di parametri come lo smorzamento e la pulsazione naturale e infine la comprensione del comportamento oscillatorio.
Domanda
Quando si effettua la taratura dinamica di uno strumento del II ordine per verificare la corretta risposta dinamica, si usano spesso prove con lo "scalino". Sapevate che questo significa che in pratica un semplice colpo secco racconta tantissimo sul comportamento dinamico?
THE END
Purtroppo no, non avendo studiato di queste materie a scuola...però complimenti, sei un pozzo di scienza,
!COFFEE
Ciao Pou, nella taratura di uno strumento di secondo ordine, un colpo secco (inteso come segnale), racconta davvero tanto per quando riguarda la taratura dello strumento. Sostanzialmente un attimo può raccontare il comportamento di tutta la vita di un accelerometro !LADY
Benissimo,
!PIZZA
Le equazioni degli strumenti di secondo ordine sono belle complicate! Non sono per nulla banali
!PIZZA
Ciao Davide, quando parliamo di taratura dinamica le cose si complicano, se poi parliamo di taratura dinamica di strumenti di secondo ordine, le complicazioni aumentano. Un'equazione tipo di uno strumento di secondo ordine è la seguente.
Anch'io la trovo complicata, magari sarà anche bella, ma da capire non è facile. Purtroppo oggi questi aspetti matematici sono fondamentali per rappresentare sistemi come accelerometri, sensori di pressione, ecc..ecc..... oggi siamo pieni di queste cose. Perfino l'IPhone al suo interno ha un accelerometro. !PIZZA
E più andiamo avanti e più i sistemi diventavo complessi! Chissà per esempio i droni militari
!PIZZA
$PIZZA slices delivered:
@pousinha(1/5) tipped @stefano.massari
stefano.massari tipped davideownzall
davideownzall tipped stefano.massari (x2)
Come get MOONed!
!discovery 30
Ciao Liberty, forse questo articolo è un po' complicato, ma non mi sono tirato indietro. Quando ho trovato i miei appunti sulla taratura dinamica di uno strumento di secondo ordine non mi sono tirato indietro. Ricordavo bene che Il rapporto di smorzamento in uno strumento del II ordine dipende dal rapporto delle ampiezze di oscillazione della risposta smorzata...e che un colpo secco ad un accelerometro, racconta la vita di quest'ultimo. Oggi gli accelerometri sono ovunque, anche nell'IPhone !LOLZ
lolztoken.com
A hardened criminal.
Credit: marshmellowman
@libertycrypto27, I sent you an $LOLZ on behalf of stefano.massari
(1/8)
Farm LOLZ tokens when you Delegate Hive or Hive Tokens.
Click to delegate: 10 - 20 - 50 - 100 HP
This post was shared and voted inside the discord by the curators team of discovery-it
Join our Community and follow our Curation Trail
Discovery-it is also a Witness, vote for us here
Delegate to us for passive income. Check our 80% fee-back Program
https://x.com/jewellery_all/status/1961549776102785493
https://x.com/lee19389/status/1961549911247524183
#hive #posh
How do you always take your time to calculate those formulas
Thanks for stopping by. The topic of this post is a bit complicated and certainly not very popular. The main concept is that dynamic calibration is the process of characterizing the response of a measuring instrument when subjected to a time-varying signal. In measurement, calibration is a fundamental process for obtaining correct readings. !HUG
@stefano.massari, I paid out 0.181 HIVE and 0.032 HBD to reward 6 comments in this discussion thread.